The Problem:
-
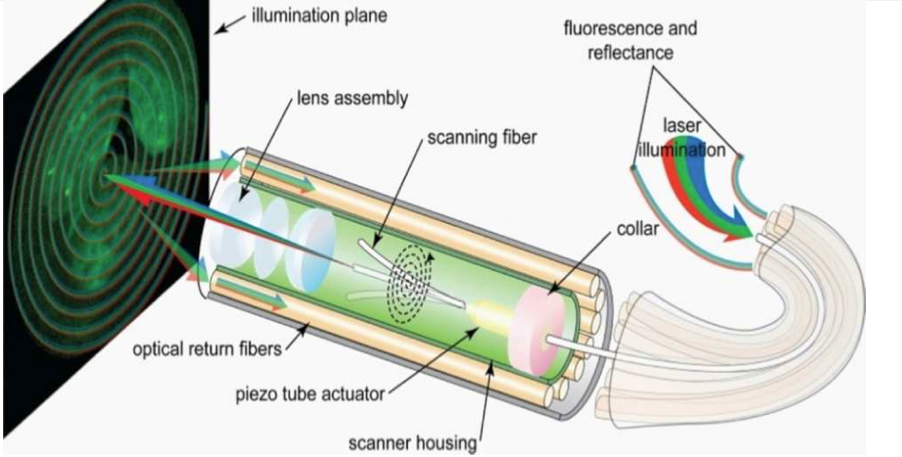
Figure 1: functional diagram multi-modal scanning fiber endoscopic system
Complete resection of tumor tissue remains one of the most important factors for survival in patients with cancer. Surgical removal is the most common front-line cancer therapy in the $17B USA 2008 market for cancer therapies. Tumor resection in the brain is exceptionally difficult because leaving residual tumor tissue leads to decreased survival and removing normal healthy brain tissue leads to life-long neurological deficits. Brain surgery requires a very high degree of dexterity, accurate navigation, and micro-precision cutting over long durations; thus it is an ideal candidate for robot assisted surgery. However, tumor resection is compounded by the need to make a small opening (keyhole) in the skull, and the difficulty of distinguishing normal from diseased tissue in an intra-operative setting.
Our Approach:
-
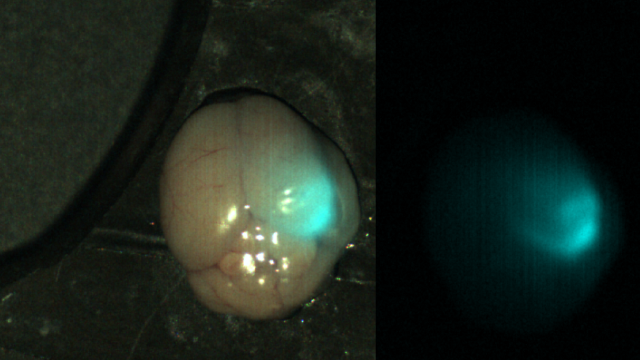
Figure 2: Near-infrared imaging of brain tumors using the Tumor Paint BLZ-100, On the left, a white light image is overlaid with an NIR image; on the right, a separate NIR image is shown
We propose to overcome two major limitations affecting robot-assisted surgery in a team approach: inability to (1) automatically and (2) optically guide treatments in a minimally-invasive intraoperative environment with advanced photonics and new cancer biomarkers. Our collaborative team includes the Human Photonics Laboratory lead by Dr. Eric Seibel aiming at development of a novel scanning fluorescence and reflectance imaging system [Figure 1], and 3 research neurosurgeons, for exploration of the new tumor paint [Figure 2]. In this project, the researchers in BioRobotics Lab will be first focusing on the development of new motion planning algorithms to automatically guide a surgical instrument subject to real time fluorescence imaging and medical procedure constraints, and second the system integration of RAVEN II open hardware and software robotic system [Figure 3] with multi-modal scanning fiber endoscopic system.
-
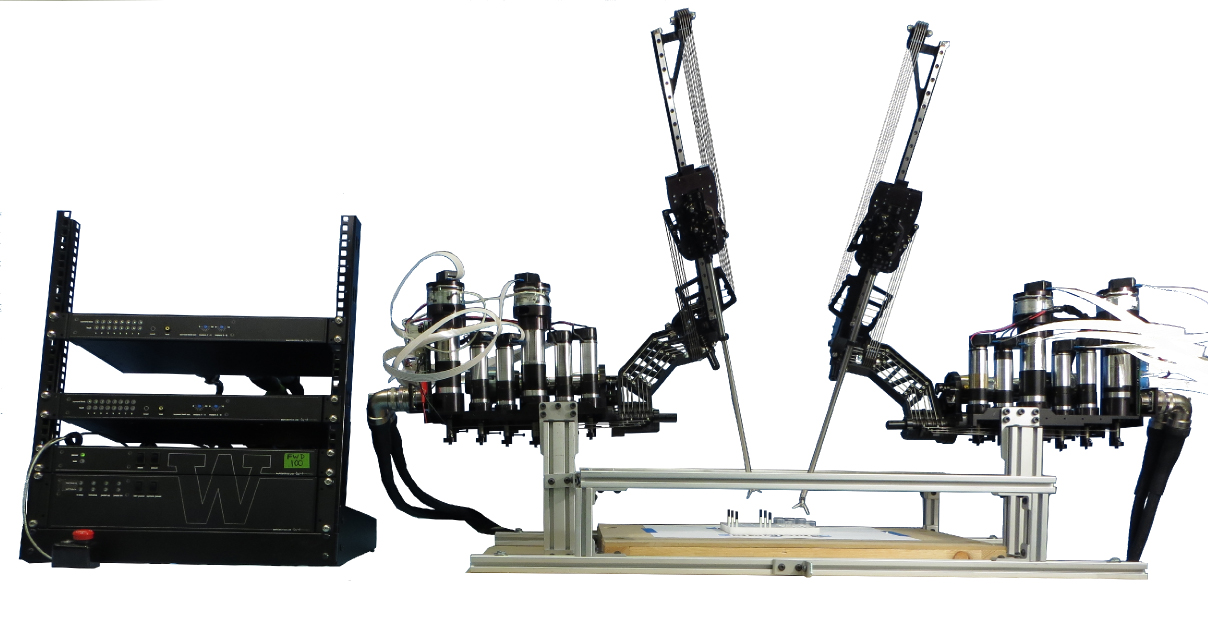
Figure 3: RAVEN II Surgical robotic system
Team:
BioRobotics Lab: Danying Hu, Blake Hannaford – system integration, motion planning
Human Photonics Laboratory: Yuanzheng Gong (PhD student), Eric Seibel – multimodal scanning fiber endoscopy
Neurosurgeons: Dr. Olson, Dr. Ellenbogen, Dr. Sekhar – development of clinically relevant phantoms and biological models