 The problem
The problem
Limb loss not only removes the ability to control the limb, but also the sensations that are felt through the limb. During locomotion, these sensations generate real-time feedback; extremely important for robust, high performance control. Yet current prostheses have no mechanism for feedback other than what can be felt through mechanical coupling inside the socket. This type of coupling often omits the subtleties of varying pressure on the bottom of the foot, which is important for balance.
Our solution
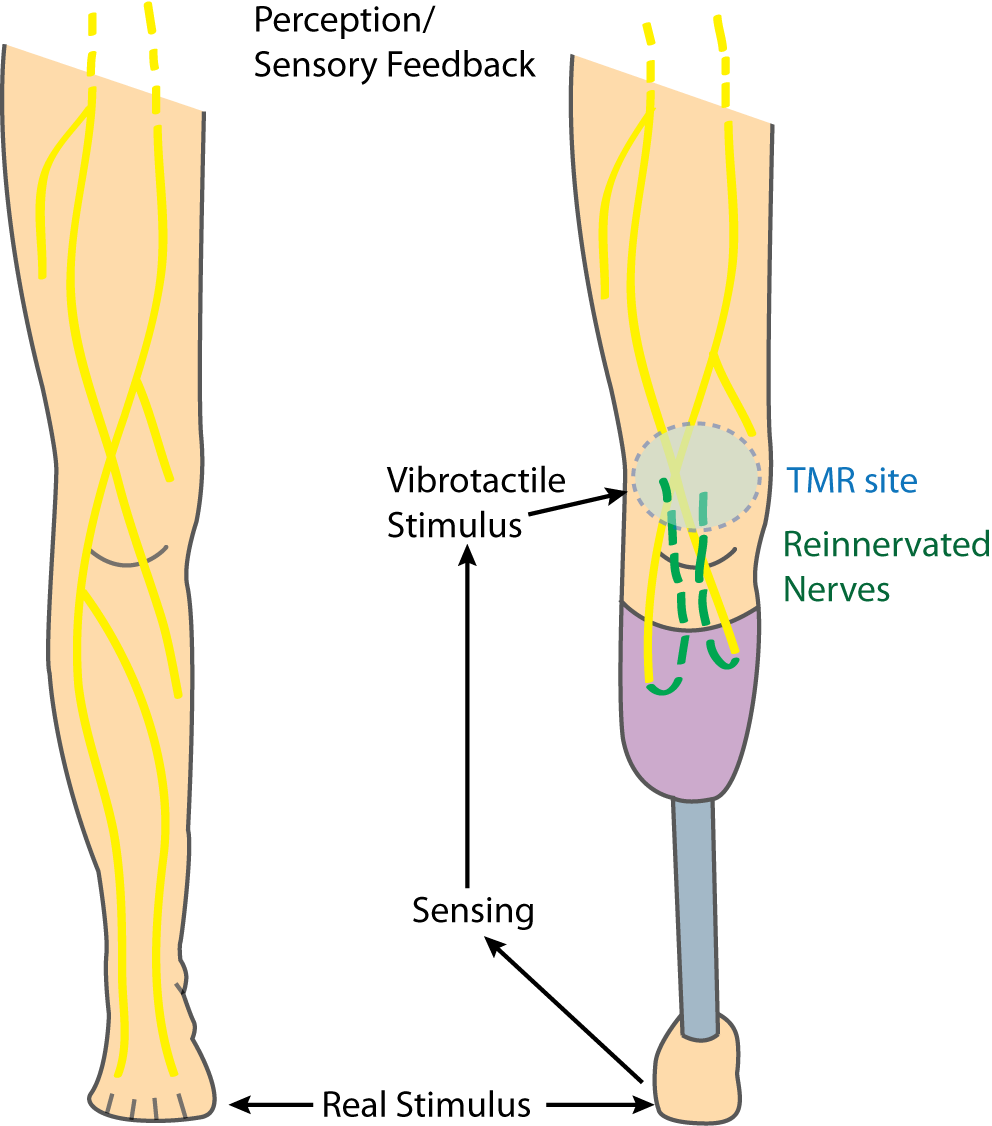
In this project, we aim to provide novel low cost sensory feedback that could be useful for identifying and preventing dangerous situations like tripping and slipping. Our research will focus on closing the sensory feedback loop for transtibial amputees (TTAs) that have undergone Targeted Muscle Reinnervation (TMR) surgery. TMR is a surgical procedure currently being tested in our research group to reduce neuroma formation at the site of amputation, but an interesting side effect is mapping of afferent nerves from the lost limb to a new patch of intact skin. This means that when the TMR site is touched, patients will feel that their phantom limb is being touched. By taking advantage of this phenomenon, we can place non-invasive stimulators over the TMR site to create discernible sensations on the missing limb, using information from sensors on the prosthetic limb.
Impact
Implementing a closed-loop system could prevent trips, falls, and other hazardous situations, giving amputees more confidence to walk with their prosthesis. Advancing technology for sensory feedback could revolutionize the prosthetics field and improve the lives of prosthesis wearers.
Affiliated Students and Faculty: Iris Jiang, Sharon Newman, Blake Hannaford
Funding Sources:

