
ns-3 Scaling for Next G Wireless Networks (NSF CCRI)
Contributors: Sumit Roy, Tom Henderson, Sian Jin, Hao Yin, Liu Cao, Muyuan Shen, Jesse Chiu
- Project Links: ns-3 Scaling for Next G Wireless Networks (NSF CCRI)
This project intends to significantly upgrade the scalability of the wireless models of ns-3 to address the challenges posed by next-generation (dense, hetnets) wireless scenarios. The project also will support educational, training, and sustainment activities.
Cloud-based network simulation and AI-in-the-loop solutions
- Project Page: Web-ns3 and NetworkGym
Web-ns3 is a modern, cloud-hosted simulation platform that integrates the power of ns-3 with intuitive web-based interfaces and AI/ML-ready workflows, enabling rapid prototyping and scalable experimentation for Next-G wireless networks.
NetworkGym is a Simulation-aaS framework to support Network AI algorithm development by providing high-fidelity full-stack e2e network simulation in cloud and allowing AI developers to interact with the simulated network environment through open APIs.
ns3-ai offers an efficient solution to facilitate the data exchange between ns-3 and Python-based AI frameworks. It does not implement any specific AI algorithms. Instead, it focuses on enabling interconnectivity between Python and C++. By cloning or downloading our work and importing the relevant Python modules, you can seamlessly exchange data between ns-3 and your AI algorithms.
ns3-gym, developed by Telecommunication Networks Group (TKN) at TU Berlin, is another framework that integrates both OpenAI Gym and ns-3 in order to encourage usage of RL in networking research.
AI/ML Approaches for Wireless PHY
- Project Page:Generative AI/ML Approaches for Wireless PHY
AI/ML approaches typically require large datasets for training of PHY channel models, in practice only very limited data is currently available from PAWR testbeds such as POWDER (https://www.powderwireless.net/). Generative Adversarial Networks (GAN) have been applied to available public over-the-air (OTA) channel measurements (https://zenodo.org/records/4135078) conducted POWDER at U. Utah campus, to generate a much larger synthetic channel dataset. Such approaches are thus promising for their applicability in performance evaluation via network simulation set-ups.
- Project Page: Ray-tracing-based NTN Channel Modeling
A real-time, geometry-aware digital twin for LEO non-terrestrial networks that integrates orbital dynamics, Sionna-based ray tracing and MATLAB-based physical-layer simulation to construct high-fidelity, environment-aware channel models, enabling accurate link-to-system mapping, end-to-end performance evaluation, and system-level optimization under realistic propagation and mobility conditions.
Efficient PHY Layer Abstractions
- Project Page: Efficient PHY Layer Abstractions
Packet-level wireless network simulators face escalating system dimensionalities resulting from dense deployment scenarios supporting wideband, Multi-Input Multi-Output (MIMO), Multi-User (MU) transmission. Managing the resulting network simulation complexity and achieving practical runtimes require continuing enhancements to physical (PHY) layer abstractions. This work improves the state-of-the-art PHY layer abstractions via a new computational workflow that maps extensive offline link simulation results for OFDM/OFDMA MIMO/MU-MIMO system performance over frequency-selective channels into Packet Error Ratio (PER) for network simulations. The proposed method is shown to require modest additional storage and the runtime is insensitive to the increase in system dimensionalities (e.g., MIMO dimensions, MU dimensions, etc.).
ns-3 WiFi PHY Error Models
- Technical Report: Technical report on validation of 802.11n error models
Industry practice relies on detailed custom-coded link-level simulations for WiFi over a suite of increasingly complex operational scenarios (e.g. inclusive of MIMO and non-AWGN channel conditions). In contrast, ns-3 network simulation relies on abstractions of the WiFi physical layer that are sufficiently accurate and are amenable to run-time integration. FUNLaB has led a sustained campaign of implementing link-to-system (L2S) mapping techniques that effectively capture the results from full link simulation. Details of our L2S methodology is available in numerous publications and simulation programs made freely available, allowing others to reproduce and extend the basic Look-Up Tables (LUT) representing the PHY error models. Over time, the WiFi PHY abstraction campaign has evolved to provide support for 802.11a OFDM, and SU-MIMO consistent with 802.11n/ac. Current efforts are focussed on extensions to MU-MIMO and OFDMA operation modes in 802.11ax.
Validation of Wi-Fi network simulation on ns-3
- Technical Report: Validation of Wi-Fi network simulation on ns-3
- Project Page: ns-3 11ax project
In this work, we provide a more thorough validation of the 802.11a OFDM ns-3 simulation model under a saturating load, and compare it with an analytical model of the DCF previously proposed. We provide throughput results for all 802.11a data rates, we explain the mathematical model employed and make our simulation programs publicly available for others to reproduce.
Simulation-based Analysis of Airborne Networks
Contributors: Jesse Chiu, Sumit Roy
This project aims to develop computational models to study and optimize the performance of networks involving airborne platforms, such as drones, aircraft, and satellites. These networks are essential for a wide range of applications, including surveillance, environmental monitoring, and emergency response. The integration of airborne platforms into cellular networks is an emerging and desirable trend. Simulation plays a crucial role by enabling researchers to analyze network behavior under the unique propagation conditions of airborne platforms, which are challenging to replicate in real-world experiments.
For the satellite-to-ground link, we revisit the LEO downlink channel model. Specifically, we propose a new derivation of the LEO-to-ground receiver channel that addresses a key gap in prior work: the absence of a geometry-aware characterization of non-line-of-sight (NLOS) links in terms of power spectral density (PSD). Our main contribution is a coherent derivation of the PSD from first principles, which not only reproduces results from existing literature but also elucidates the causal relationship between key PSD features and the underlying propagation geometry parameters.

LEO Downlink Channel Model Revisited: Scattering Geometry-Inspired Derivation
- Publications: NTN Downlink Channel Model
This paper presents a new derivation of LEO-to-ground receiver channel model to address a clear gap in the prior art: the lack of an appropriate geometry aware characterization of non LOS (NLOS) link model represented by the power spectral density (PSD). Specifically, the main contribution is a coherent derivation of the PSD from 1st principles that is able to reproduce results in prior art and explain the causal relationship of main PSD features to the propagation geometry parameters.
NS3-based Digital Twin for NTN

This work presents an NS-3–based digital twin framework for next-generation Non-Terrestrial Networks (NTN) that enables realistic link- and system-level simulations under satellite mobility, Doppler, and beam dynamics.
It integrates the ns3-leo mobility module, which models orbital motion and geometry, with 5G-LENA, which emulates the full 5G NR protocol stack (L1/L2) including HARQ, link adaptation, and scheduling. The framework supports both statistical and scenario-aligned (ray-tracing) channel models, allowing accurate evaluation of delay, propagation, and SINR behavior.
By overcoming the conservative data-rate assumptions and lack of open evaluation tools in 3GPP Release 19 NTN specifications, this platform enables performance benchmarking beyond 3GPP targets and provides a foundation for integrating AI/ML-based optimization in future B5G/6G NTN research.
LEO Satellite Monitoring
- Project Page: LEO Satellite Monitoring
This project develops a low-cost, SDR-based satellite downlink monitoring framework for receiving, tracking, and processing Ku-band signals from LEO constellations. The project aims to support real-time satellite identification through TLE-based Doppler prediction matching, as well as multi-antenna beamforming for improved received signal quality and robust satellite-to-device communication.
Radar Sensing and Communication
Contributors: Sumit Roy, Xiangyu Gao, Sian Jin
Radar Object Recognition
- Publications: Radar Object Recognition
Millimeter-wave (mmW) radars are being increasingly integrated into commercial vehicles to support new advanced driver-assistance systems (ADAS) by enabling robust and high-performance object detection, localization, as well as recognition – a key component of new environmental perception.
We propose a novel radar multiple-perspectives convolutional neural network (RAMP-CNN) that extracts the location and class of objects based on further processing of the range-velocity-angle (RVA) heatmap sequences. To bypass the complexity of 4D convolutional neural networks (NN), we propose to combine several lower-dimension NN models within our RAMP-CNN model that nonetheless approaches the performance upper-bound with lower complexity.
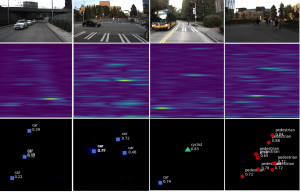
Figure: test examples from the city road scenario; For each column, the top-row image is the synchronized camera image for visualization, the second-row image is the corresponding radar RA heatmap, and the bottom-row image is the visualization of the RAMP-CNN model results.
High-resolution Radar Imaging
- Publications: High-resolution Radar Imaging
A key shortcoming for present-day vehicular radar imaging is poor azimuth resolution (for side-looking operation) due to the form factor limits on antenna size and placement.
We propose a solution via a new multiple-input and multiple-output synthetic aperture radar (MIMO-SAR) imaging technique, that applies coherent SAR principles to vehicular MIMO radar to improve the side-view (angular) resolution. The proposed 2-stage hierarchical MIMO-SAR processing workflow drastically reduces the computation load while preserving image resolution. To enable coherent processing over the synthetic aperture, we integrate a radar odometry algorithm that estimates the trajectory of ego-radar.
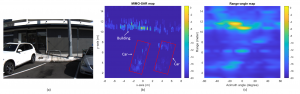
Figure: MIMO-SAR imaging for roadside experiment 1. (a) The camera image for the imaging environment with two inclinedly parked cars; (b) The MIMO-SAR imaging result where we use two rectangles to cover the parked cars; (c) Range-angle map imaging for single-frame radar data.
Automotive Radar Test-bed
Vehicle Radar Testbed is a millimeter-wave (mm-wave) FMCW radar sensor that can be used to test the performance of signal processing algorithms and collect data in field tests. The testbed shown below consists of the AWR1642 BoosterPack and DCA1000EVM from Texas Instruments.
Features:
- Two available bandwidths: 76-77 GHz and 77-81GHz
- MIMO configuration: Four Receive antennas and two Transmit antennas with Time Division Modulation(TDM)
- Tx Power: 12dbm
- Rx Gain: 30dB
- C674x DSP for FMCW Signal Processing
The development of signal processing techniques along with progress in the mm-wave semiconductor technology plays a key role in automotive radar systems. Various signal processing techniques have been developed to provide better resolution and estimation performance in all measurement dimensions: range, azimuth angles, and velocity of the targets surrounding the vehicles.
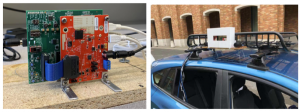
Figure: (left) The lab-scale mmW radar test-bed; (right) The automotive radar test-bed accompanied by cameras mounted on a vehicle.
Radar-Comm Coexistence
Wireless mediums provide finite resources for the purposes of radar and data communications. Often, these two functions are at odds with one another and compete for these resources. The broad solution space to this problem encompasses cooperation or codesigning of systems with both radar and communications functions.
Automotive Applications: Integration of automotive radars with vehicle communication networks will play a key role in enabling various intelligent driver-assist functions, and ultimately autonomous vehicles. Rad-Comm coexistence is envisaged as a new approach for managing the multi-radar operation for improving radar functionality (e.g., avoiding multi-radar interference) via integration of vehicular networks (both V-2-V and V-2-I) in support.
